

Human Inspired, designed with Dexterity in mind
The new RH6D supersedes the previous RH7D&RH5D combining their features while offering improved payload capability.
This models offers similar features to the Adult-size RH8D, in a more compact form factor. It is designed to fit smaller Humanoid Robots (up to 1.2m tall) and Robot arms
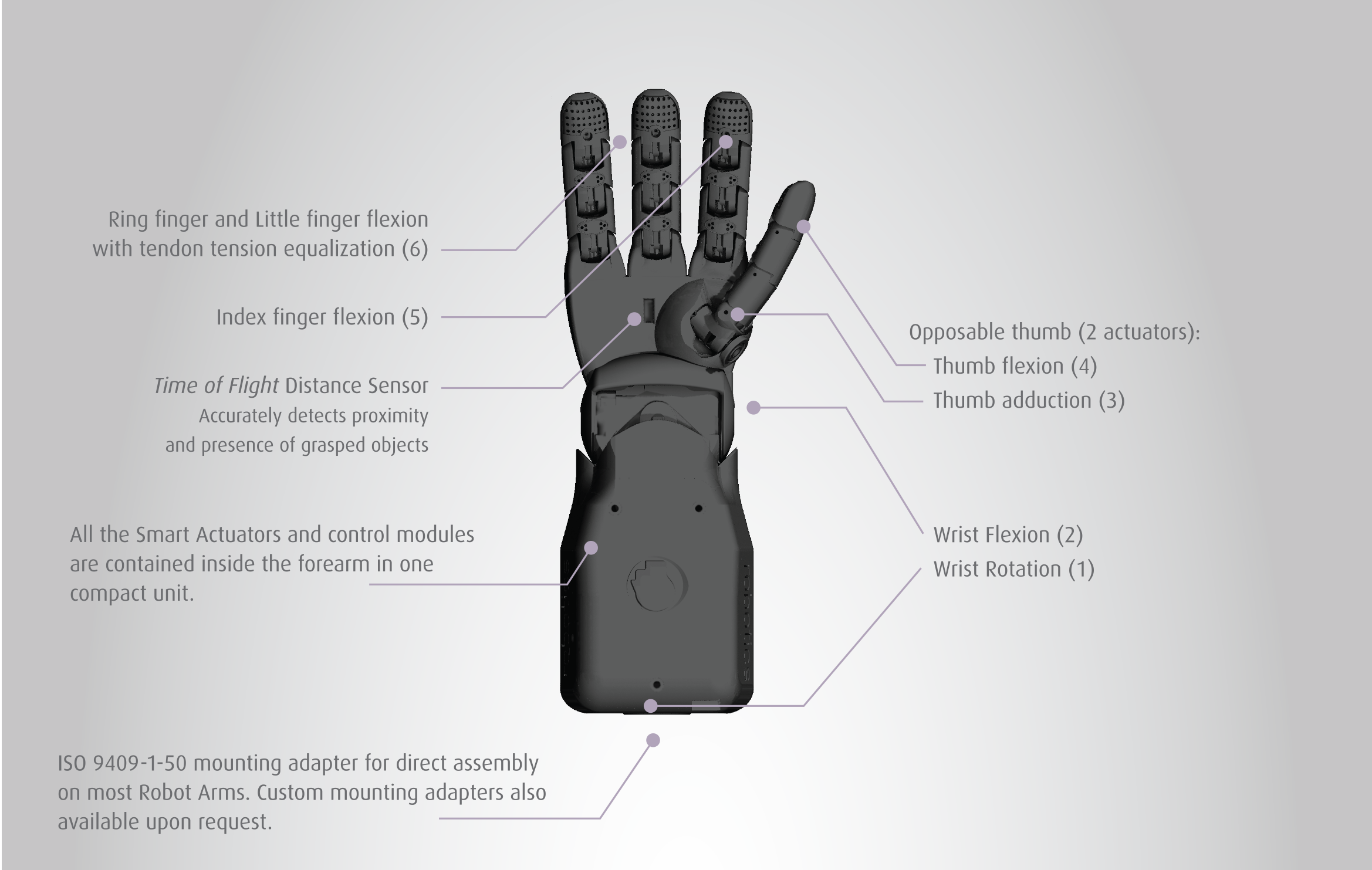
This unit features 15 degrees of freedom, including opposable thumb. Features advanced Dexterity and offers rich H.R.I. experiences.
Additionally, 3-segment fingers are controlled by smart actuators.
The RH6D is inspired in the Human hand to be capable of mimicking its grips.
Advanced Mechanical design
15 Degrees of Freedom
6 Smart actuators for precise control
(actuators contained inside the unit)
Under actuated design aims to provide the right balance between fine control and conformance to the shape of the objects.

Sensorial feedback
All actuators provide real time control and feedback of position, speed and current measurement (with direction), enabling inference of applied force.
Additional data including actuator temperature, (over)load status and PWM, a Palm Time-of-Flight Distance sensor and optional Capacitive pads at the back of the palm complete the sensor array.
RH6D in action: Videos
Be sure to check out the RH6D Robot hand Youtube playlist .
In the video, the RH6D Robot hand shown in white, on the left.
Middleware & Software
URDF models available for use in Simulation
Open source ROS package
Python (PyPot)
Low level Serial Protocol (UART): Dynamixel Protocol 1.0 and 2.0 compatible
Performance & Payload
Payload (Vertical pull): 750g
Payload (3D space): 450g
Weight: 305g
(all actuators are contained inside the unit)
When assembling on Robot arms, it is possble to bypass the built-in Wrist Rotation DoF and use the Arm’s own rotation DoF, if convenient.
Technical Data
Supply Voltage: 9V to 24V
Embedded processor: 32 bit Arm Cortex M
Dedicated co-processor for each smart actuator
Logic Interfaces
UART over RS485
(or Full or Half duplex TTL, compatible with Robotis systems)USB interface: for Configuration and Maintenance
Optional Bluetooth: online maintenance and diagnostics.
e-Manual
For more information about using the RH6D Robot hand, consult the dedicated e-Manual Page